Lidar et mapping : crûˋer une carte du monde autour du robot en scannant l'espace
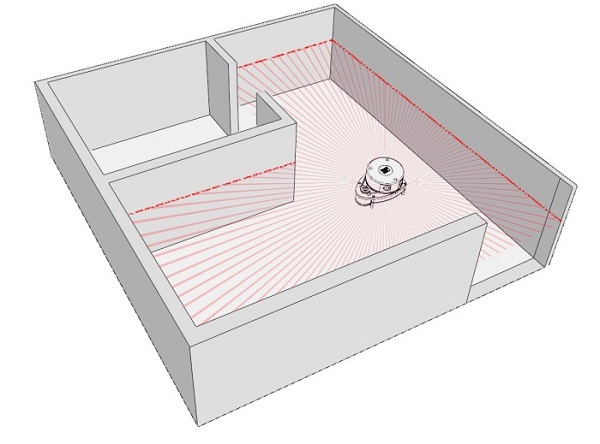
Un Lidar est un capteur de distance laser qui tourne sur lui-mûˆme pour dûˋtecter les obstacles tout autour de lui. Il sert aux robots û repûˋrer les murs, les portes et autres ûˋlûˋments des alentours.

Tout dãabord, nous allons voir comment le robot interprû´te les donnûˋes du Lidar pour situer les obstacles autour de lui.
Une fois que nous aurons compris le fonctionnement du Lidar, nous allons passer û la construction de la carte de lãenvironnement du robot.
1 - Le fonctionnement du Lidar
Le capteur de distance laser tourne sur lui-mûˆme û 360ô¯. û chaque degrûˋ, il prend une mesure de la distance de lui û lãobstacle en face, et renseigne lãordinateur de son angle de rotation ainsi que de la distance mesurûˋe. Cela crûˋe un point ayant pour coordonnûˋes un angle et une distance. On apelle ce type de coordonnûˋes des coordonnûˋes polaires.
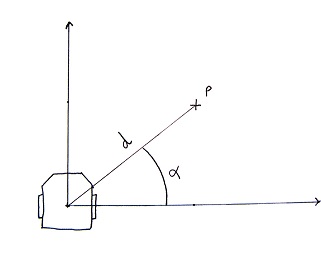
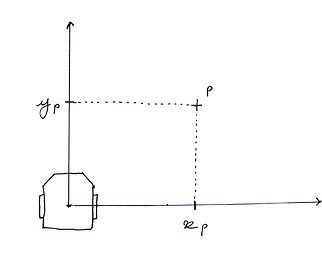
Nous crûˋons un repû´re avec le Lidar au centre. Ce sera notre carte. Lãobjectif est de placer chacun des points repûˋrûˋs par le Lidar sur ce repû´re. Ils reprûˋsenterons les obstacles sur la carte. Nous devons donc convertir les coordonnûˋes des points du lidar de la forme polaire (un angle et une distance) û la forme cartûˋsienne (un X et un Y).
Pour convertir des coordonnûˋes polaires en coordonnûˋes cartûˋsiennes, nous utilisons la formule mathûˋmatique suivante :
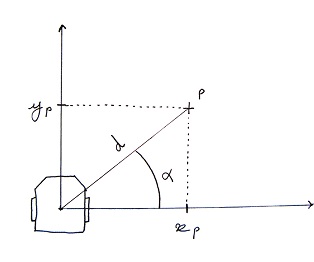
Exemple
Le lidar dûˋtecte un obstacle û 5 mû´tres lorsqu'il a tournûˋ de 53ô¯.
Nous avons donc un point P de coordonnûˋes polaires P(5, 53ô¯).
La position du point P sur l'axe X est :
X(p) = 5 * cos(53ô¯) = 3
La position du point P sur l'axe Y est :
Y(p) = 5 * sin(53ô¯) = 4
Les coordonnûˋes cartûˋsiennes du point P sont donc P(3, 4)
2- La construction de la carte : le mapping
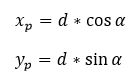
Si le robot connait sa position sur la carte et quãil dûˋtecte un obstacle par rapport û lui, il doit pouvoir situer cet obstacle sur la carte. Inversement, si on ordonne au robot de se rendre en un lieu prûˋcis de la carte, il doit pourvoir situer ce lieu par rapport û lui.
Voici un exemple qui traduit de faûÏon mathûˋmatique la situation :
Exemple
Le robot sait que ses coordonnûˋes dans le repû´re Monde sont robot(5, 5, -45ô¯), et il a repûˋrûˋ un point P dans son propre repû´re ayant pour coordonnûˋes Probot(2, 5).
Il en dûˋduit, aprû´s avoir calculûˋ, que les coordonnûˋes du point P dans le repû´re du monde sont Pmonde(10, 7).
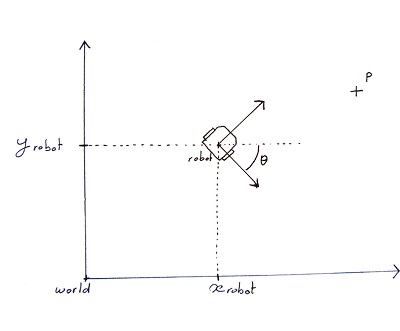
Nous avons les coordonnûˋes du point P par rapport au robot, et les coordonnûˋes du robot par rapport au monde. Pour avoir les coordonûˋes du point P par rapport au monde, l'idûˋal serait d'avoir une formule du type :

Ce truc magique existe, c'est une matrice de passage.

Voici la formule de la matrice de passage :


Exemple
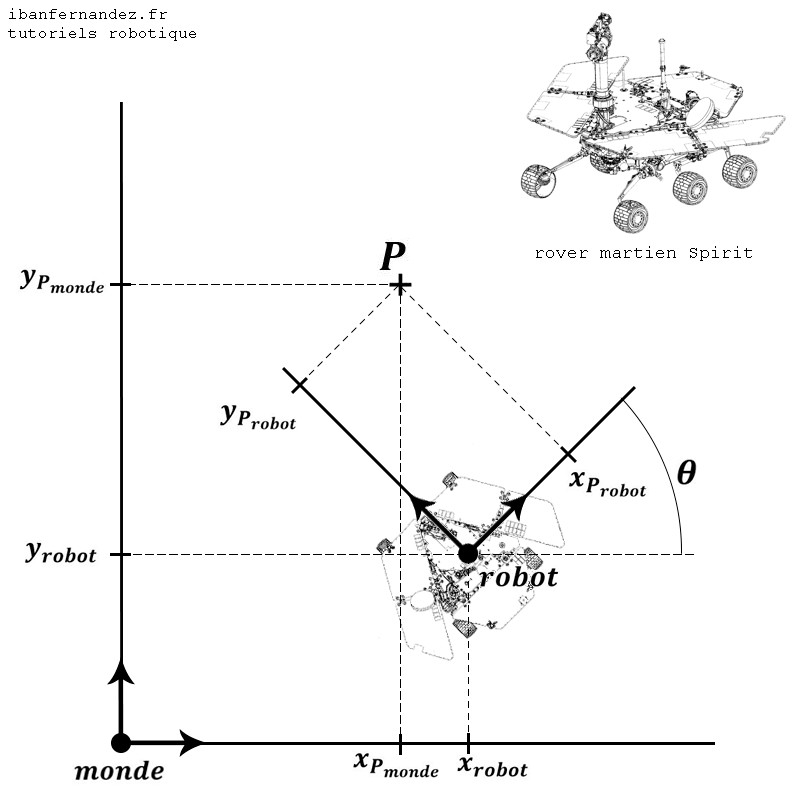
Le robot martien Spirit sait quãil se trouve û lãemplacement  dans le monde (ici le monde est Mars). La notation
mathûˋmatique des coordonnûˋes du robot est de la forme
dans le monde (ici le monde est Mars). La notation
mathûˋmatique des coordonnûˋes du robot est de la forme  .
.
Le robot dûˋtecte un obstacle (peut-ûˆtre un martien) nommûˋ P, ayant pour coordonnûˋes  dans son repû´re robot.
dans son repû´re robot.
Pour replacer le martien par rapport û Mars, cãest-û -dire exprimer le point P du repû´re robot au repû´re monde, on utilise la matrice de
passage  .
.
On met le point  sous forme de matrice pour pouvoir le multiplier par la matrice de passage :
sous forme de matrice pour pouvoir le multiplier par la matrice de passage :
On applique la matrice de passage sur le point  pour
trouver
pour
trouver  :
:
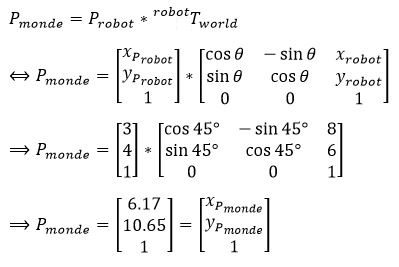
Nous avons donc les coordonnûˋes du point P par rapport au monde  .
.
Maintenant, le robot sera capable de se dûˋplacer dans une carte, de capter les obstacles autour de lui et de mettre û jours la carte en y intûˋgrant les obstacles captûˋs.
Implûˋmentation dans le robot
En cours.
Le code informatique
En cours.
Rûˋfûˋrences
En cours.